Siemens Simcenter Prescan | Autonomous Driving and ADAS Simulation Validation Platform
The era of virtual simulation has arrived! Siemens Simcenter Prescan is a top-tier simulation platform designed specifically for Advanced Driver Assistance Systems (ADAS) and Autonomous Driving (AD). Jotactic provides complete consulting and technical services for implementation, construction, and integration, helping your development team recreate long-tail edge-case scenarios and achieve efficient zero-risk software and hardware iterations in a virtual environment.

Core Positioning: Throughout the Complete Development V-Cycle
As the complexity of autonomous vehicles grows exponentially, Prescan supports the complete V-Cycle development process, providing a consistent simulation environment from 'complete traffic networks' to 'component level' across design, testing, and validation phases.
| Development Stage | Platform Engineering Application Methods |
|---|---|
| Model-in-the-Loop (MIL) | Quickly validates algorithms and control logic during the pure model phase. |
| Software-in-the-Loop (SIL) | Executes and fully regresses actual software code in a virtual environment. |
| Hardware-in-the-Loop (HIL) | Injects or projects physics-based synthesized sensor signals into physical ECU controllers. |
| Vehicle-in-the-Loop (VIL/VeHIL) | Combines real vehicles (on dynamometer test beds) with virtual traffic for vehicle-level validation. |
Modular Architecture and Four-Step Workflow
Prescan has an intuitive, open core software architecture that allows engineers to complete end-to-end closed-loop simulations in just four simple steps:

1 Build Environment
Imports roads via GIS/OpenDRIVE/OSM, and places buildings, traffic signs, and road users.
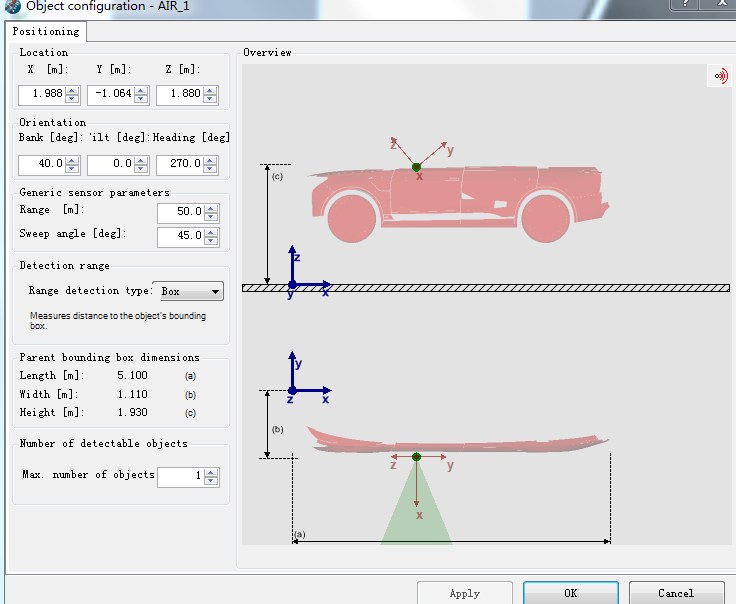
2 Add Sensors
Configures the ego vehicle with sensors like cameras, radars, lidars, and sets installation positions and parameters.
3 Build Models
Automatically generate Simulink interfaces in the Compilation Sheet to write perception and control logic.
4 Execute and Analyze
Run simulations, 3D Viewer visualization, batch testing, and result data analysis.
Four Core Modules of Prescan Software
GUI Scenario Editor
Drag-and-drop editing to graphically create roads, traffic, sensors, and 3D environments.
Compilation Sheet
Automatically generates MATLAB / Simulink interfaces, seamlessly connecting scenarios, sensors, and control models.
Simulink Control Layer
Design perception, fusion, planning, and control algorithms in a familiar environment.
3D Visualization Viewer
Real-time 3D visualization, supporting camera angle changes and sensor coverage playback.
Three Major Functional Highlights
1. Highly Parameterized Rich Simulation Scenarios
Environment and traffic flow are the touchstones of algorithms. Prescan provides powerful and fully parameterized scenario building capabilities:
I. Road and Environment Construction
Supports graphical building of straights, curves, intersections, roundabouts, ramps, and tunnels. Supports direct import of OpenDRIVE, OpenStreetMap (OSM), and GIS data, perfectly reconstructing real-world road networks. Road surface materials also include friction coefficients and reflection characteristics for accurate computation by physical sensors.
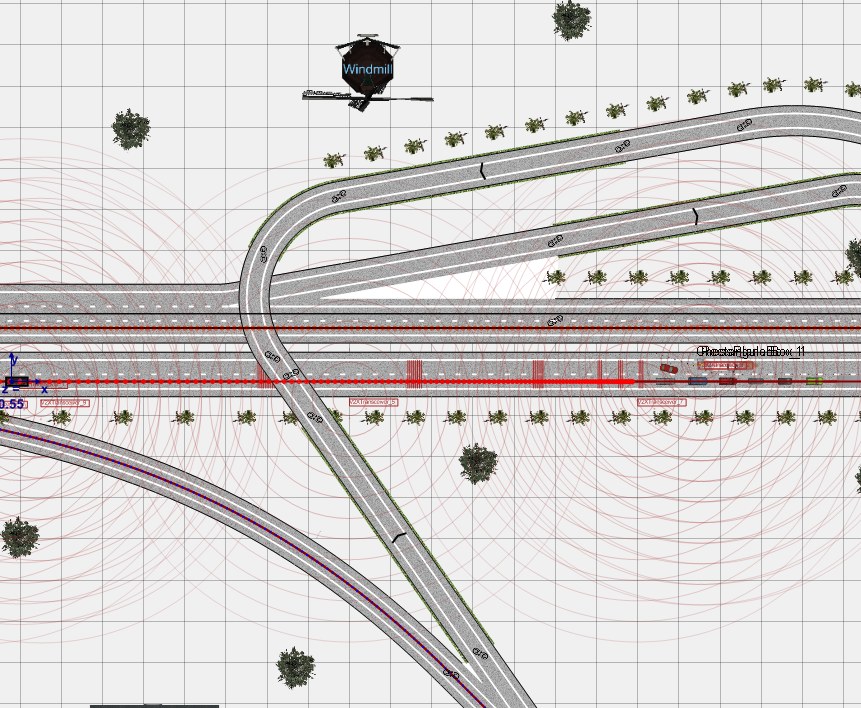
II. Diverse Traffic Flows and Extreme Condition Traversing
Flexibly places sedans, trucks, motorcycles, and Vulnerable Road Users (VRUs, such as pedestrians, cyclists, wheelchairs).
- Built-in Automatic Traffic Generator (ATG): One-click logical traffic generation based on lanes and density.
- Condition Traversing and DOE Optimization: Can set vehicle speed, TTC, and lateral offset as variables, combined with the HEEDS tool for automatic traversing, generating hundreds to thousands of batch test matrices at once to pinpoint the worst-case conditions.

III. Dynamic Weather and Lighting Reproduction
Freely adjusts day and night times, solar azimuth, and couples with physical sensors to realistically recreate challenging long-tail conditions such as heavy rain, dense fog, puddle reflections, headlight glare, and backlighting.





IV. Built-in Library of 86 Standard Regulatory Testing Scenarios
Includes a fully parameterized golden-standard regulatory library for virtual pre-testing before real-vehicle certification, dramatically reducing the risk of lost points and failures in road tests.
2. Three-Level Realistic Sensor Model Library
Prescan provides a complete sensor lineup (Camera, Radar, Lidar, Ultrasonic, GNSS/IMU) required for autonomous driving. The core highlight is its innovative three-level fidelity design, allowing engineers to strike a perfect balance between 'computational cost' and 'physical authenticity':
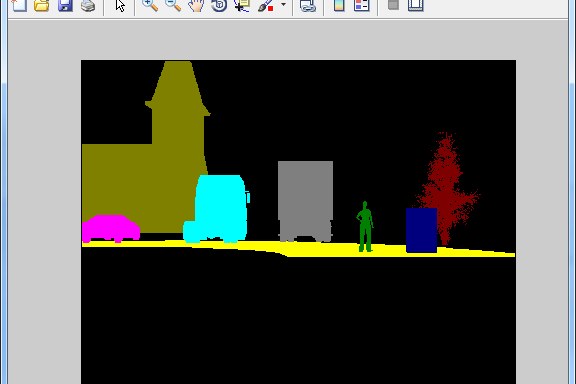
Level 1: Ground-Truth (Ideal Sensors)
Features:Noise-free, directly outputs perfect object lists (position, relative speed, classification) and lane geometries (TIS / AIR / ALMS).
Applications:Extremely lightweight computation, suitable for early-stage fast validation of decision and control logic.
Level 2: Probabilistic Sensors
Features:Superimposes statistical False Negatives, False Positives, and random measurement noise based on distance and occlusion rate at the detection level.
Applications:Tests the robustness of perception fusion algorithms at lower computational costs under near-real machine random error conditions.
Level 3: Physics-Based Sensors
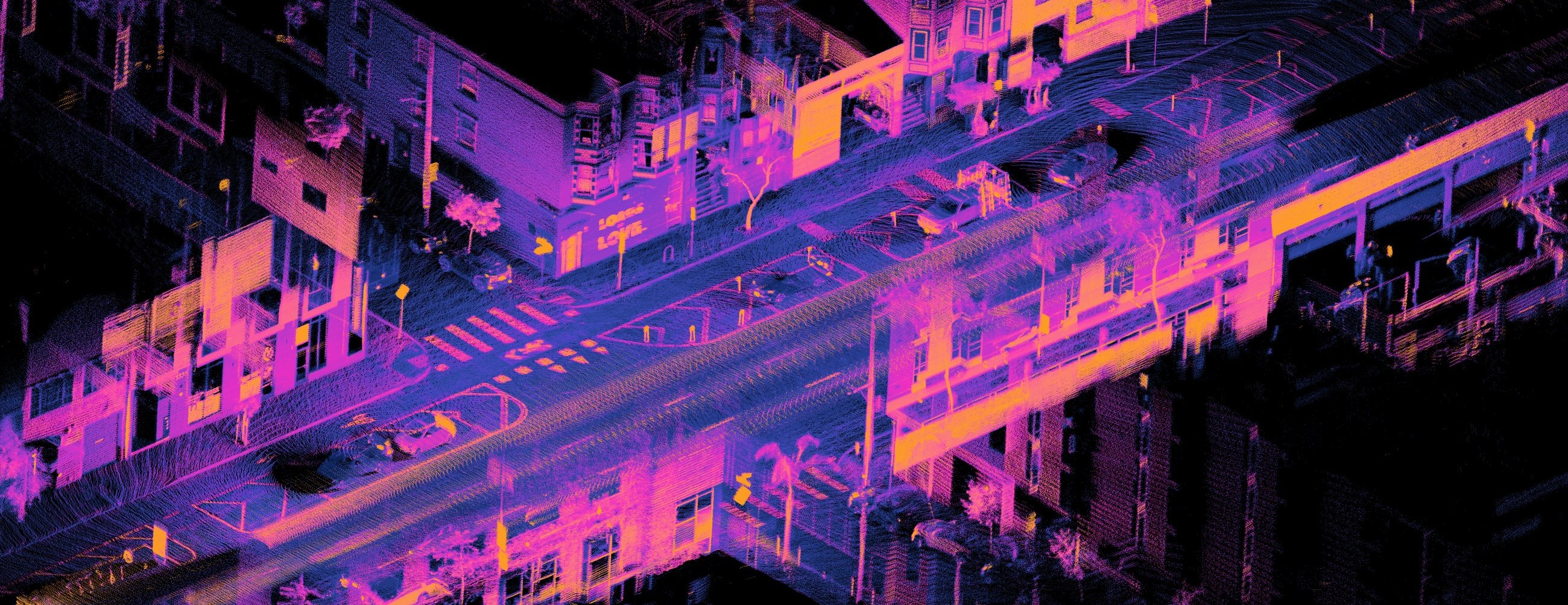
Features:Uses GPU Ray-Tracing technology to simulate the true propagation, reflection, multipath, and scattering behaviors of electromagnetic waves and light in 3D space, outputting the lowest-level raw signals.
Applications:High fidelity, providing critical data for HIL testing and perception deep learning networks (perception algorithm R&D).
In-depth Analysis of Sensor Specifications and Outputs
📸 Visual Camera Models (Camera)
Supports monocular, stereo, fisheye, surround view, and PB physical-level cameras. Customizable pixels and distortion parameters, recreating dynamic range (HDR), lens glare, and night vision effects.
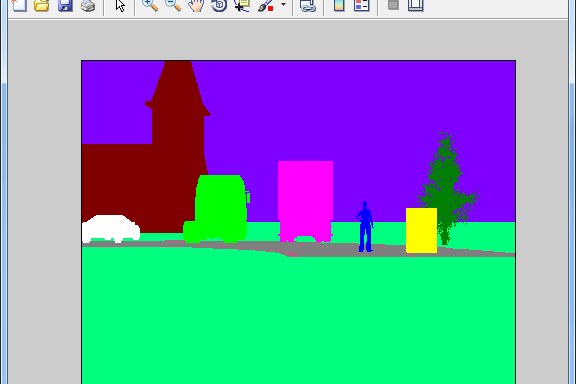
Perfect Synthetic Data Output:The same physical camera can simultaneously output RGB images, Depth Maps, Optical Flow, and Semantic Segmentation with pixel-perfect Ground-Truth. Eliminates manual annotation and drastically reduces the training cost of perception algorithms.
📡 Millimeter-Wave Radar Models (Radar)
Measures distance, azimuth angle, and relative Doppler speed using FMCW frequency-modulated continuous wave. PB physical radar accurately simulates side-lobe antenna patterns, target angle material Radar Cross Section (RCS), multipath, and ground clutter interference.
Output Formats:Detection point clouds, Range-Doppler maps (RD Map), and raw I/Q signals.
🚨 Lidar Models
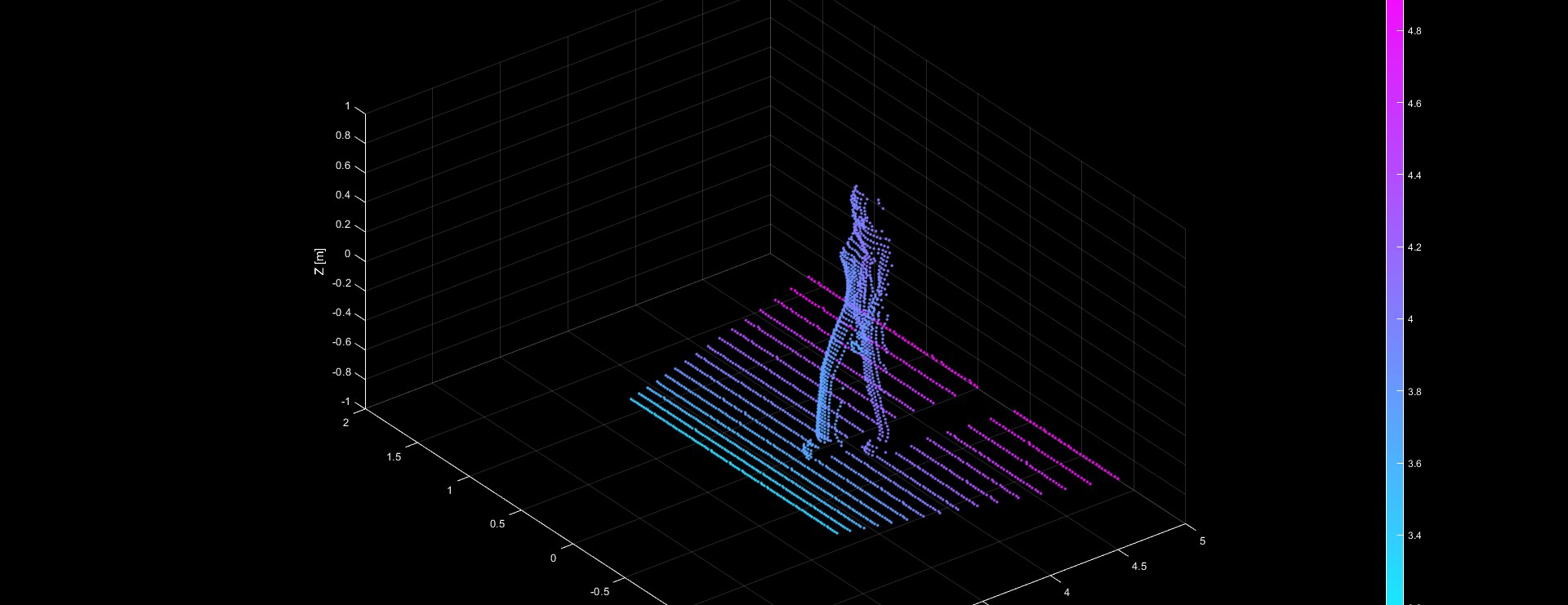
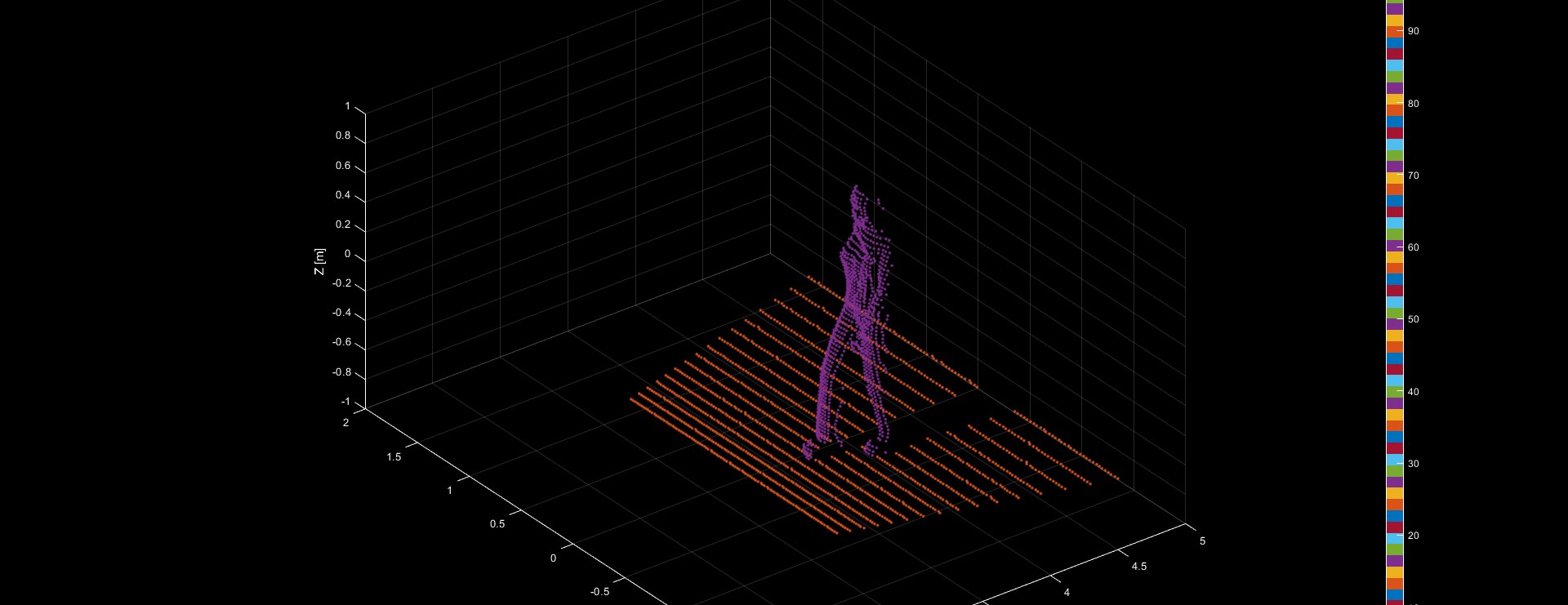
Supports mechanical rotating, solid-state, and MEMS Lidars, configurable with different channel counts like 16 / 32 / 64 / 128. PB-Lidar uses beam-by-beam ray tracing, combining rain and fog attenuation, and returns geometric point clouds based on material reflectivity.
Output Formats:High-density 3D point clouds with intensity, depth images, and object segmentation.
3. Powerful Open Collaboration and Automation Architecture
Prescan possesses excellent software openness, allowing seamless integration with various tools in the automotive industry and open-source ecosystems:
-
check_circle
Deep Integration with MATLAB / Simulink:Automatically generates actuator I/O interface blocks via Compilation Sheet, directly running closed-loop simulations and supporting Stateflow state machine control.
-
check_circle
C / C++ APIs and Custom Models:Can directly integrate existing production-grade ECU product code, or compile as a standalone SimCpp executable to achieve ultra-high efficiency simulation rates.
-
check_circle
Python Automation Pipeline:Enables fully programmatic scenario batch modification, automated execution, data extraction, and KPI post-processing through Python interfaces, and seamlessly integrates with PyTorch / TensorFlow deep learning frameworks and CI/CD regression tests.
-
check_circle
FMI / FMU Standard Collaboration:Supports the Functional Mock-up Interface industry standard, allowing black-box import of third-party vehicle dynamics models (such as CarSim, Amesim FMU) or power/battery subsystem models, protecting supplier Intellectual Property (IP).
-
check_circle
Integration with Software Stacks and Professional Microscopic Traffic Flows:
- AD Software Stack:Serves as a virtual world and high-fidelity sensor signal source for open-source or self-developed AD frameworks (like ROS / ROS 2, Baidu Apollo, Autoware).
- Traffic Simulators:Supports integration with microscopic traffic simulators like PTV Vissim, SUMO, and Aimsun through plug-ins, balancing macro traffic reality and micro perception details.
-
check_circle
Unreal Game Engine Rendering:Deeply integrates with the Unreal Engine through WorldViewer, providing cinematic-quality materials, dynamic lighting, and realistic weather effects to maximize the training efficiency of visual perception algorithms.
-
check_circle
V2X Communication Co-simulation:Built-in V2X plug-in simulates vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication delays, packet loss, and coverage, perfectly validating intersection collision avoidance, construction zone warnings, and cooperative fleet (Platooning) control.
Summary of Implementation Benefits and Enterprise Value
Implementing the Siemens Simcenter Prescan platform brings six core engineering benefits to R&D teams:
Faster
Virtual iteration combined with batch and Prescan360 cloud parallel simulation (elastically scheduling Azure computing power) significantly shortens the autonomous driving validation cycle.
Safer
Hazardous conditions and high-risk long-tail extreme edge-case scenarios are recreated and tested in a virtual environment, achieving absolute 'zero risk'.
More Cost-Effective
Effectively supplements and streamlines real-vehicle road testing with highly efficient virtual simulation, drastically cutting hardware, venue, and testing labor costs.
More Comprehensive
Three-level sensor models combined with 86 included standard regulatory scenarios provide a comprehensive automated validation environment covering the complete ODD.
Reproducible
Scenarios are fully parameterized, and the testing process is 100% reproducible and traceable, eliminating the pain point of being unable to reproduce occasional failures in road testing.
Contact Us to Accelerate Your Virtual Simulation Journey
Jotactic has deep experience in autonomous driving testing and validation, providing you with complete advisory and technical services such as professional Prescan platform implementation, sensor selection and layout optimization, customized scenario library modeling, HIL real-time laboratory setup, and automated testing pipeline integration.