dSPACE Automotive Electronics and Autonomous Driving Full-Cycle Testing and Validation Software
With the increasing complexity of automotive electronics and intelligent driving systems (ADAS/AD) today, how can you ensure the absolute safety of software algorithms before they are deployed in actual vehicles? Jotactic introduces the complete dSPACE software toolchain solution to you. From model design, code generation, and virtual simulation (SIL) to real-time Hardware-in-the-Loop (HIL) and cloud-based Continuous Integration (CI/CD), we assist teams in implementing comprehensive 'Front-loading' testing, reproducing any extreme long-tail scenario in a virtual environment 24/7 with zero risk.
Core Methodology: Full-Lifecycle Validation Based on ASAM XIL API
The core engineering value of the dSPACE toolchain lies in the high reusability of testing assets. Through the standard ASAM XIL API unified access interface, the exact same test scripts, environmental models, and communication configurations can perfectly span across all core validation stages of the V-model.
| Testing Stage | Platform Core Positioning and Implementation Method |
|---|---|
| Model-in-the-Loop (MIL) | Model-in-the-Loop (MIL): In the earliest stages of development, before physical hardware exists, closed-loop validation of environmental models using control strategy models on a PC. |
| Software-in-the-Loop (SIL) | Software-in-the-Loop (SIL): Testing generated control software or Virtual ECUs (V-ECUs) on a PC, hardware-free, supporting large-scale parallel testing on workstations and the cloud. |
| Processor-in-the-Loop (PIL) | Processor-in-the-Loop (PIL): Deploying generated code to target processor evaluation boards to compare and validate resource consumption and timing equivalence on actual hardware. |
| Hardware-in-the-Loop (HIL) | Hardware-in-the-Loop (HIL): Simulating the full-vehicle environment using highly reliable real-time simulators to conduct signal-level and power-level closed-loop validation on physical production ECU controllers. |
Modular Product Line
1. Core Simulation and Integration Platforms
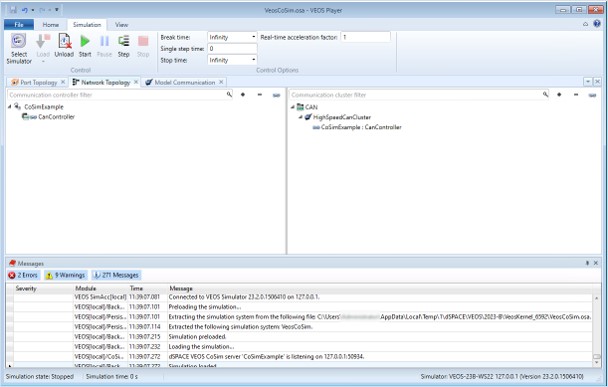
💻 VEOS — PC-Based Virtual Validation Platform (SIL)
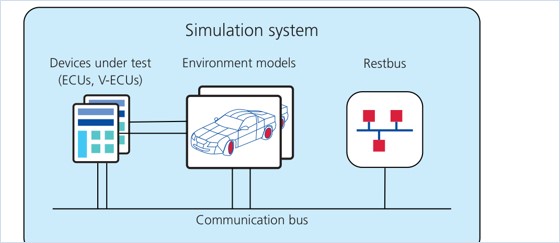
VEOS is a pure PC-based software simulation platform. It requires no physical I/O hardware and can simultaneously execute multiple Virtual ECUs (V-ECUs), Simulink models, FMU containers, and full-vehicle restbus communication networks on a standard PC.
- Key Features:Supports CAN/LIN/Automotive Ethernet communication simulation; can be containerized via Docker and deployed to the cloud for large-scale parallel regression testing.
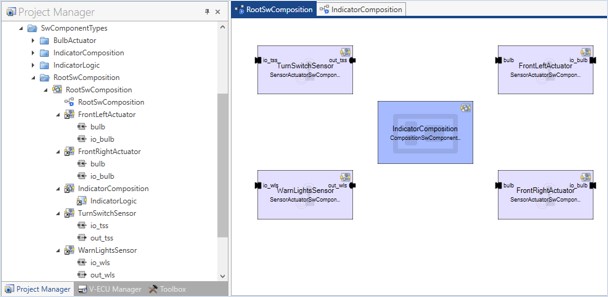
📐 SystemDesk — AUTOSAR Architecture Modeling and V-ECU Generator
SystemDesk is used to highly intuitively build or import (ARXML) compliant AUTOSAR system and software architectures, providing the RTE, OS, and communication stacks.
- Key Features:It is responsible for perfectly encapsulating production application layer and Basic Software (BSW) code into .vecu or .fmu Virtual ECU containers suitable for SIL execution or cross-platform reuse.
🎛️ SCALEXIO — Modular Real-Time HIL / RCP Hardware Platform
When testing moves to hardware, SCALEXIO provides ultimate real-time computing performance. From desktop LabBoxes to full cabinet systems, all feature FPGA-based precise fast-timing I/O.
- Key Features:Responsible for hosting real-time applications compiled by ConfigurationDesk to perform closed-loop hardware testing with physical ECUs or act as a stand-in for actual vehicles using Rapid Control Prototyping (RCP) algorithms.

2. Production-Level Models and Automated Code Generation
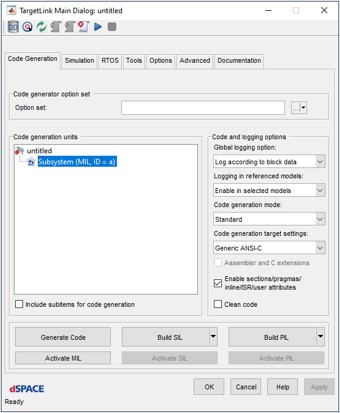
💾 TargetLink — Production-Level Automated Code Generator
Directly transforms Simulink / Stateflow models into highly efficient, highly optimized fixed-point or floating-point C/C++ code.
- Key Features:Fully supports AUTOSAR Classic / Adaptive specifications and MISRA checking; built-in MIL/SIL/PIL switching main dialog; certified to the highest safety levels of ISO 26262.
🚗 ASM and ModelDesk — Automotive Simulation Models and Graphical Scenario Editor
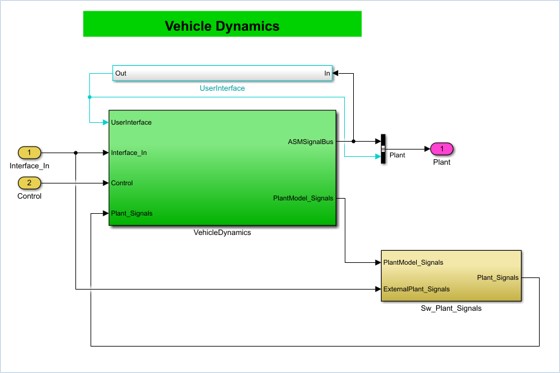
- ASM (Automotive Simulation Models):Simulink-based, fully open, and customizable multi-body physical models covering vehicle chassis dynamics, tires, drivetrains, combustion engines, battery motors, and traffic flows (ASM Traffic).
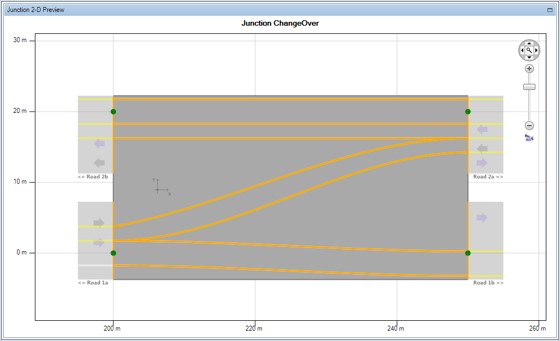
- ModelDesk:The graphical parameter management and scenario configuration front-end for ASM. Supports one-click manual drawing or importing real-world maps from OpenDRIVE and OpenStreetMap.
3. ADAS/AD Real-Grade Sensor Simulation Environment
👁️ AURELION — Physics-Based Sensor Simulation and High-Fidelity Visualization
For the End-to-End closed-loop requirements of autonomous driving perception networks (cameras, radars, lidars, ultrasonics), AURELION employs leading GPU Ray-Tracing and physical material spectral calculations.
Multi-Level Output Capability: The same 3D scenario can synchronously output:
- Raw Data:High-fidelity images, radar echo signals, and raw lidar point clouds fed directly into perception neural networks.
- Object List:Bounding boxes and boundary information for rapid integration by decision-making algorithms.
- Ground-Truth:Pixel-perfect semantic segmentation and depth maps for automated test scoring and perception training.


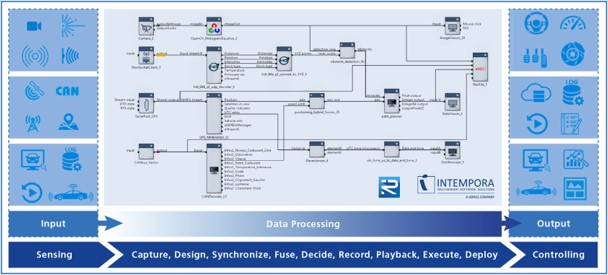
🔀 RTMaps — Multi-Sensor Data Acquisition and Real-Time Fusion Framework
RTMaps is a component-based (Drag-and-drop) big data streaming framework. Featuring 600+ plug-and-play modules, it specializes in precise timestamp alignment and timing synchronization for high-frequency, multi-type sensors (Cameras, Lidar, GNSS/IMU, buses). Its low-memory overhead (Zero-copy) design is the industry benchmark for Data Logging and Deterministic Replay.
4. Experiment, Measurement Control, and Automation Pipelines
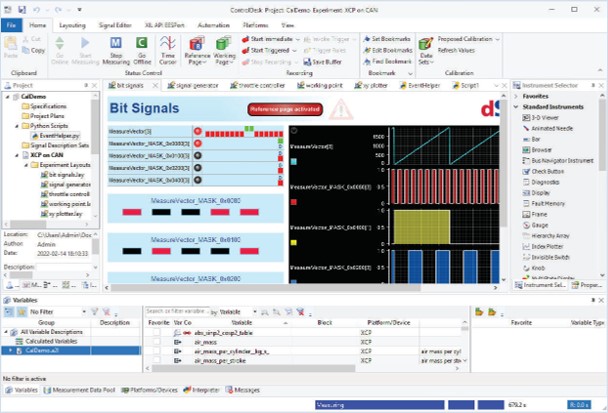
📊 ControlDesk — Universal Experiment, Measurement, Calibration, and Visualization HMI
ControlDesk is the unified operating interface spanning all dSPACE real-time platforms and VEOS SIL. It integrates ECU measurement, calibration (CCP/XCP protocols), diagnostics (ODX), and rich 3D visualization dashboards all in one. Measurement results fully comply with the ASAM MDF industry-standard format.
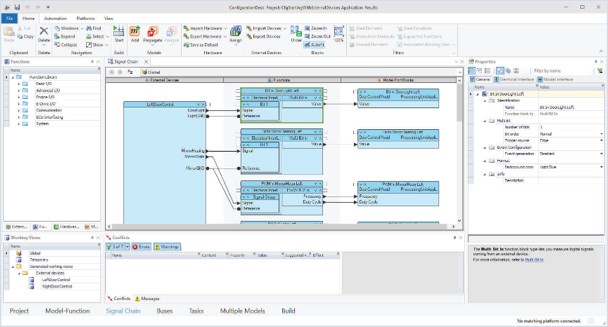
🔌 ConfigurationDesk — Functional I/O Modeling and Real-Time Application Building
During HIL implementation, ConfigurationDesk rapidly maps Simulink models or FMU containers to the I/O signal chains and electrical channels of physical hardware boards via graphical drag-and-drop. It compiles behavioral models into independent real-time applications downloaded to hardware, while supporting smart Fault Injection (FIU) and communication matrix (DBC/ARXML) imports.
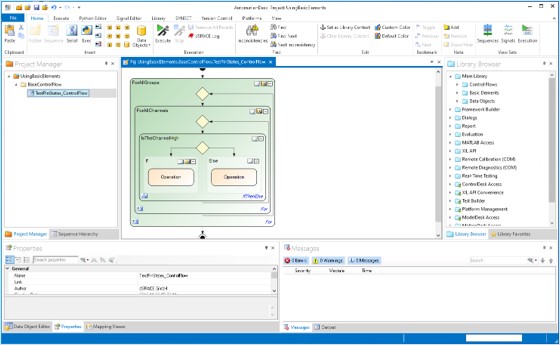
🤖 AutomationDesk & RTT / SDK — Test Automation Orchestration and Python Real-Time Testing
- AutomationDesk:A graphical IDE that enables the creation and management of complex test sequences without coding, automatically generating PDF/HTML test reports.
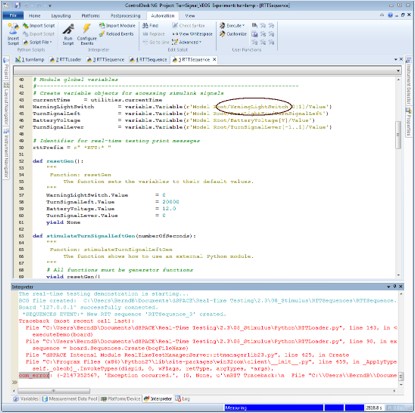
- Real-Time Testing (RTT) / SDK:The ultimate testing solution based on Python (Pytest, Robot Framework). RTT's Python interpreter executes synchronously with models in the core hardware at every sampling step (millisecond precision, no communication latency). The exact same test code is perfectly reused for both SIL (VEOS) and HIL (SCALEXIO).
End-to-End Scenarios and Implementation Combinations
The core technical advantage of dSPACE lies in encapsulating models and code into decoupled standard containers: such as V-ECUs (.vecu), model containers (.sic), restbus containers (.bsc), and standard FMUs. This allows R&D teams to freely mix and match in different engineering scenarios, flexibly realizing workflows.
1. Virtual ECU Software-in-the-Loop (SIL V-ECU) [ Suitable for Early Software Front-Loading and CI/CD ]
- Product Combinations:SystemDesk + TargetLink + VEOS + ControlDesk + Platform API Package
- Data Flow Implementation:C code is generated by TargetLink and encapsulated into V-ECUs (.vecu) by SystemDesk, then imported into VEOS Player to be assembled with other containers into an offline application (.osa). Large-scale parallel regression testing is executed in Docker cloud environments using Python scripts (Platform API).
2. HIL Electrical Fault Injection [ Suitable for ISO 26262 Safety Mechanism Validation ]
- Product Combinations:SCALEXIO (incl. FIU Hardware) + ConfigurationDesk + AutomationDesk (EESPort) + ASM
- Data Flow Implementation:Configure the Fault Injection Unit (FIU) and I/O routing in ConfigurationDesk. Automated test procedures send fault sequences via the XIL API's EESPort (Electrical Error Simulation Port), instantly disconnecting hardware circuits and creating shorts to ground/power, realistically testing the diagnostic trouble codes (DTC) and safe degradation responses of the ECU under test.
3. ADAS / AD Sensor-in-the-Loop Closed-Loop (Sensor-in-the-Loop HIL/SIL) [ Suitable for Autonomous Driving and SOTIF Scenario Coverage ]
- Product Combinations:ModelDesk + ASM Traffic + AURELION + Sensor Sim PC (High-End GPU) + SCALEXIO or VEOS
- Data Flow Implementation:ModelDesk provides OpenDRIVE/OpenSCENARIO scenario matrices. ASM Traffic provides target vehicle dynamics and ego vehicle trajectories. AURELION calculates Ray-Tracing in real-time on GPU PCs, injecting realistic sensor data (e.g., Radar RD maps, Lidar point clouds) into the autonomous driving controller; throttle/steering commands from the system under test are then instantly fed back to the ASM model, forming a perfect ADAS physical-level closed loop.
Summary of Core Enterprise Implementation Benefits
-
📉
Minimization of Defect Costs Comprehensive virtualization of software architectures and restbus simulation (SIL) allows 80% of software errors to be caught and fixed in the extremely early stages of a project, before hardware benches are available.
-
📈
Maximization of Test Coverage Following the ASAM XIL standard, the exact same scripts work for both SIL and HIL. Combined with 24/7 automated testing and Docker cloud parallelism, this dramatically increases the coverage of extreme boundary and functional safety test cases.
-
🤝
Open Ecosystem Across Toolchains Fully compatible with FMI/FMU model exchange standards, AUTOSAR Classic/Adaptive architectures, and deep native integration with MATLAB/Simulink.