Siemens Simcenter Prescan | 自動駕駛與 ADAS 模擬驗證平台
虛擬模擬時代來臨!Siemens Simcenter Prescan 是專為先進駕駛輔助系統(ADAS)與自動駕駛(AD)打造的頂級模擬平台 。捷策動能提供完整的導入、建構與整合顧問技術服務,協助您的開發團隊重現長尾邊界場景,在虛擬環境中實現零風險的軟硬體高效迭代 。

核心定位:貫穿完整開發 V-Cycle
自動駕駛車輛的複雜度呈指數成長,Prescan 支援完整的 V-Cycle 開發流程,在設計、測試、驗證各階段提供從「完整交通網路」到「元件級」的一致模擬環境 。
| 開發階段 | 平台工程應用方式 |
|---|---|
| Model-in-the-Loop (MIL) | 於純模型階段快速驗證算法與控制邏輯。 |
| Software-in-the-Loop (SIL) | 實際軟體代碼(Code)於虛擬環境中執行與全面回歸。 |
| Hardware-in-the-Loop (HIL) | 將物理級合成感測訊號注入或投影至實體 ECU 控制器。 |
| Vehicle-in-the-Loop (VIL/VeHIL) | 結合實車(置於轉鼓測試台)與虛擬交通進行整車級驗證。 |
模組化架構與四步驟工作流程
Prescan 擁有直覺、開放的核心軟體架構,讓工程師僅需透過簡單的四步驟,即可完成端到端的閉迴路模擬:

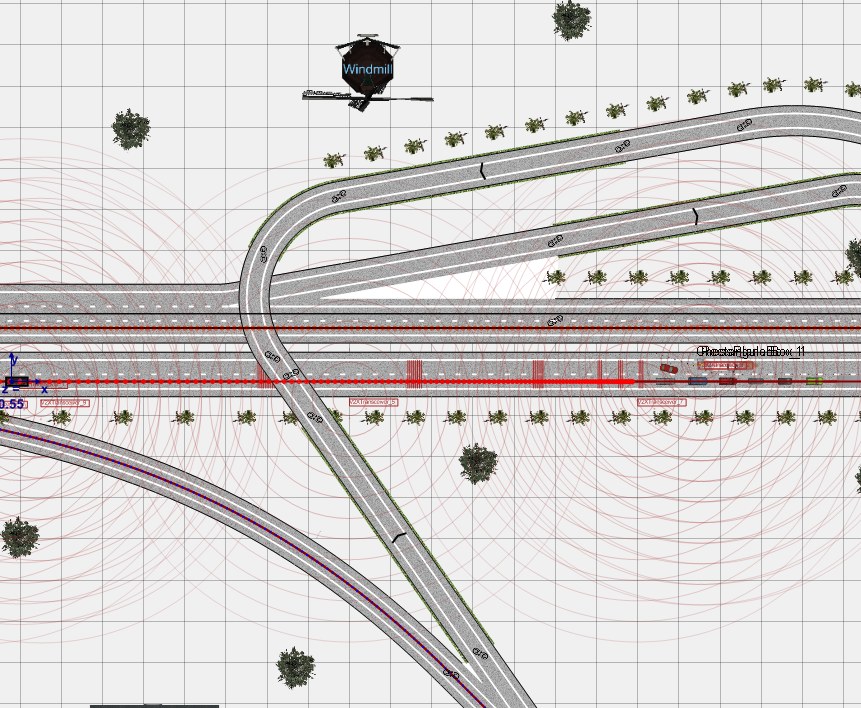
1 建構環境
以GIS/OpenDRIVE/OSM 匯入道路,放置建築、交通標誌與道路使用者。
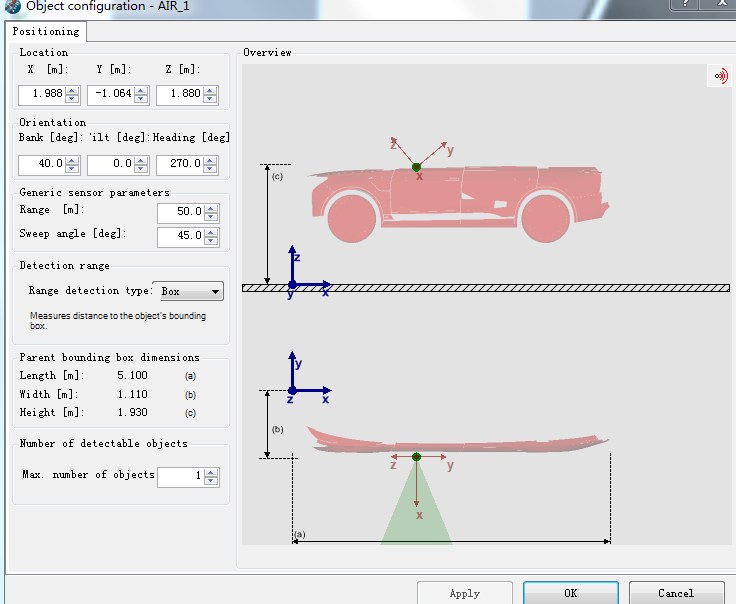
2 加入感測器
為自車配置相機、雷達、光達等感測器並設定安裝位置與參數。
3 建立模型
於 Compilation Sheet 自動產生 Simulink 介面,撰寫感知與控制邏輯。
4 執行與分析
執行模擬、3D Viewer 可視化、批次測試與結果資料分析。
Prescan 軟體核心四大模組
GUI 場景編輯器
拖放式編輯,圖形化建立道路、交通、感測器與 3D 環境 。
Compilation Sheet
自動生成 MATLAB / Simulink 介面,無縫連結場景、感測器與控制模型 。
Simulink 控制層
在您熟悉的環境設計感知、融合、規劃與控制算法 。
3D Visualization Viewer
即時 3D 可視化呈現,支援相機視角變換與感測器覆蓋範圍回放 。
三大功能亮點
1. 高度參數化的豐富模擬場景
環境與交通流是演算法的試金石。Prescan 提供強大且完全參數化的場景建構能力 :
I. 道路與環境建構
支援圖形化搭建直線、彎道、交叉路口、環島、匝道與隧道 。支援 OpenDRIVE、OpenStreetMap (OSM) 與 GIS 數據直接匯入,完美重建真實世界路網 。路面材質更包含摩擦係數與反射特性,供物理感測器精準運算 。
II. 多元交通流與極化工況遍歷
可彈性放置轎車、卡車、機車及易受傷道路使用者(VRU,如行人、自行車、輪椅) 。
- 內建自動交通生成器(ATG):一鍵依車道與密度填充邏輯車流 。
- 工況遍歷與 DOE 優化:可將車速、TTC、橫向偏移量設為變數,結合 HEEDS 工具自動遍歷,一次產生數百至數千個批次測試矩陣,精準搜出最惡化工況 。

III. 動態天候與光照重現
自由調整日夜時間、太陽方位角,並能與物理級感測器耦合,逼真重現大雨、濃霧、積水路面反射、車燈眩光與逆光等挑戰性長尾工況 。





IV. 內建 86 個標準法規測試場景庫
隨附完整參數化的黃金基準法規庫,在實車認證前進行虛擬預測試,大幅降低路測失分與失敗風險 。
2. 三層級逼真感測器模型庫
Prescan 提供自動駕駛所需的完整感測器陣容(相機、雷達、光達、超音波、GNSS/IMU) 。核心亮點在於其創新的三層級逼真度設計,讓工程師能在「計算成本」與「物理真實性」之間取得完美平衡 :
第一層,Ground-Truth(理想感測器)
特點:無雜訊,直接輸出完美的物件清單(位置、相對速度、分類)與車道線幾何(TIS / AIR / ALMS)。
應用:計算極輕量,適合開發早期快速驗證決策與控制邏輯。
第二層,Probabilistic(機率感測器)
特點:在偵測層依距離、遮擋率疊加統計式的漏檢(False Negative)、誤檢(False Positive)與隨機量測雜訊。
應用:以較低計算成本,在接近實機的隨機誤差工況下,考驗感知融合演算法的魯棒性。
第三層,Physics-Based(物理級感測器)
特點:利用 GPU 射線追蹤技術(Ray-Tracing),模擬電磁波與光線在三維空間中的真實傳播、反射、多徑與散射行為,輸出最底層的原始訊號。
應用:高逼真度,為 HIL 測試與感知深度學習網絡(感知算法研發)提供關鍵資料。
感測器規格與輸出深度解析
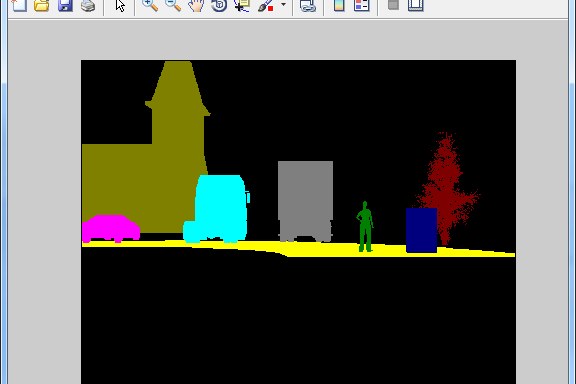
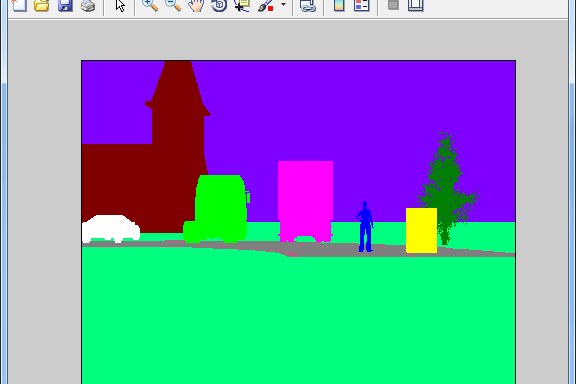
📸 視覺相機模型(Camera)
支援單目、立體、魚眼、環景與PB物理級相機 。可自訂像素、畸變參數,重現動態範圍(HDR)、鏡頭眩光與夜視效果 。
完美合成資料輸出:同一台物理相機可同步輸出 RGB 影像、深度圖(Depth Map)、光流以及具備像素級完美 Ground-Truth 的語義分割(Semantic Segmentation) 。免人工標註,大幅降低感知算法的訓練成本 。
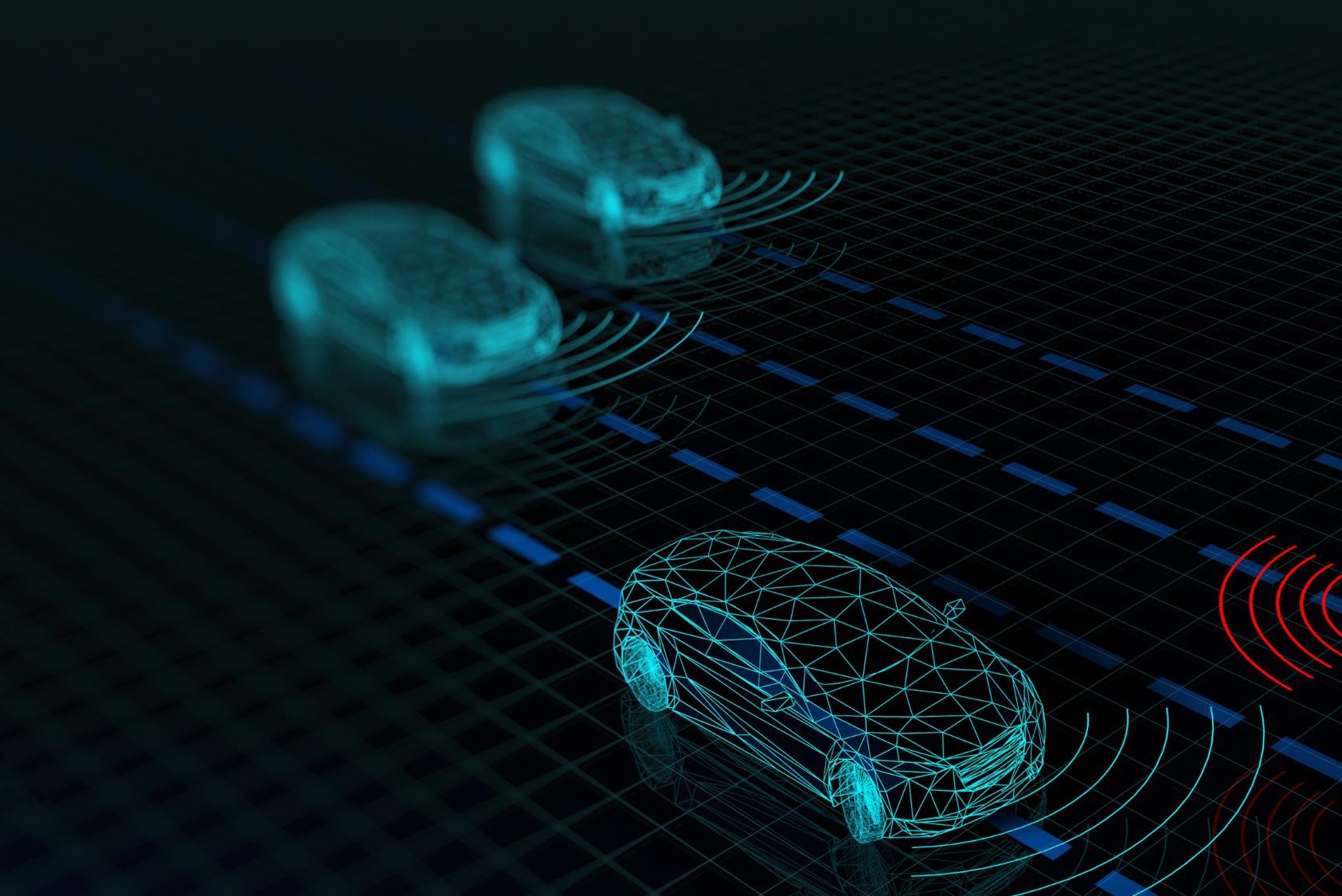
📡 毫米波雷達模型(Radar)
以 FMCW 調頻連續波量測距離、方位角與相對都卜勒速度 。PB 物理雷達精準模擬旁瓣天線方向圖、目標角度材質反射截面積(RCS)及多徑、地面雜波干擾 。
輸出形式:偵測點雲、距離-相對速度圖(RD Map)及原始 I/Q 訊號 。
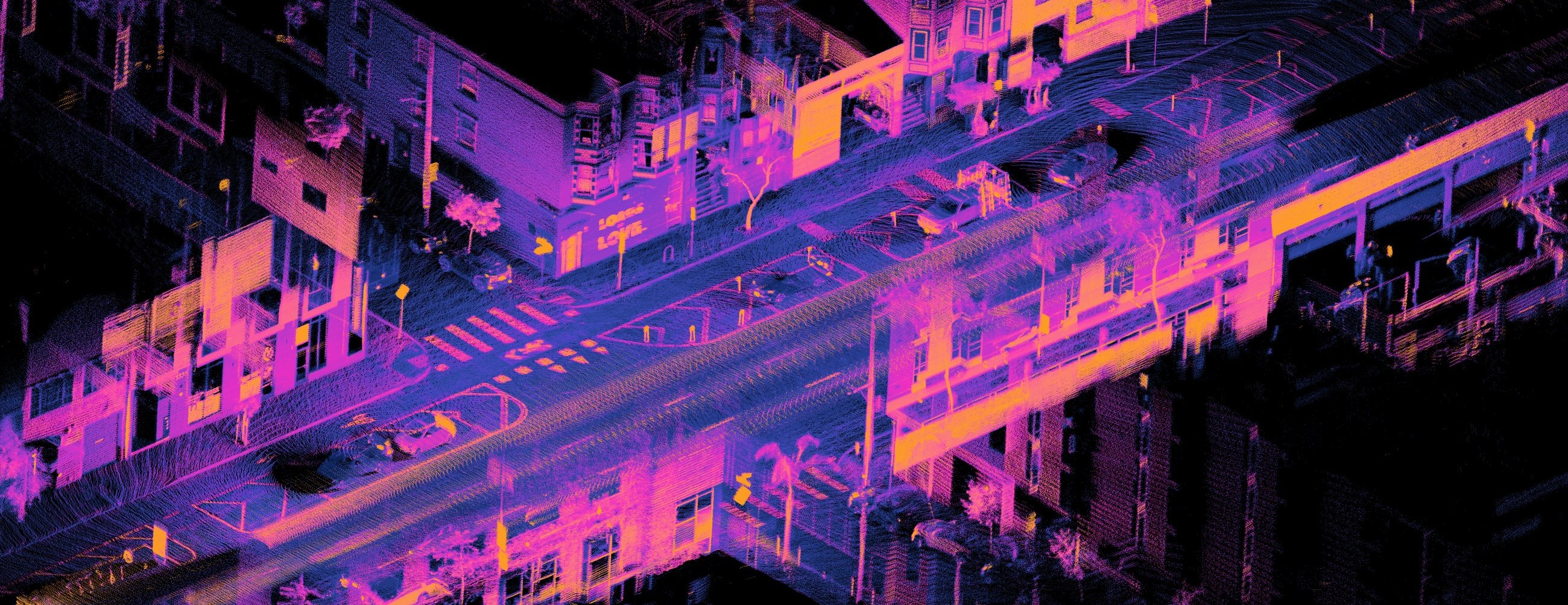
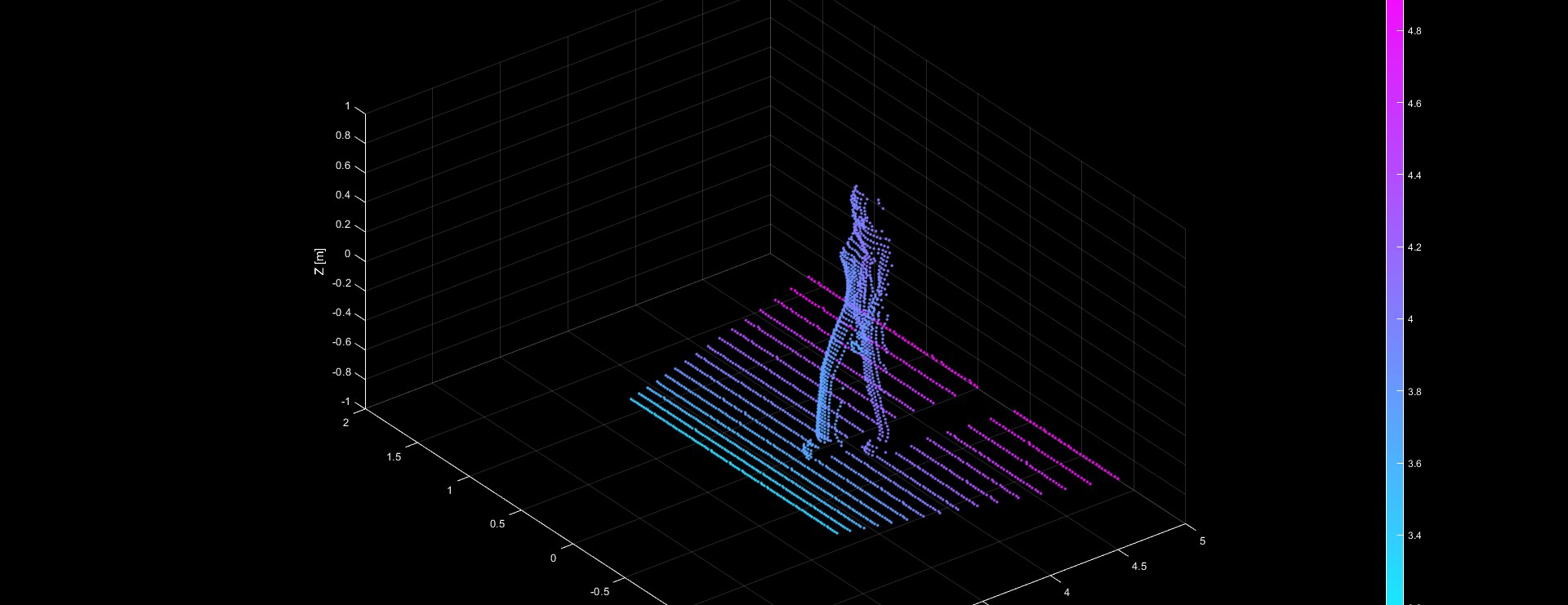
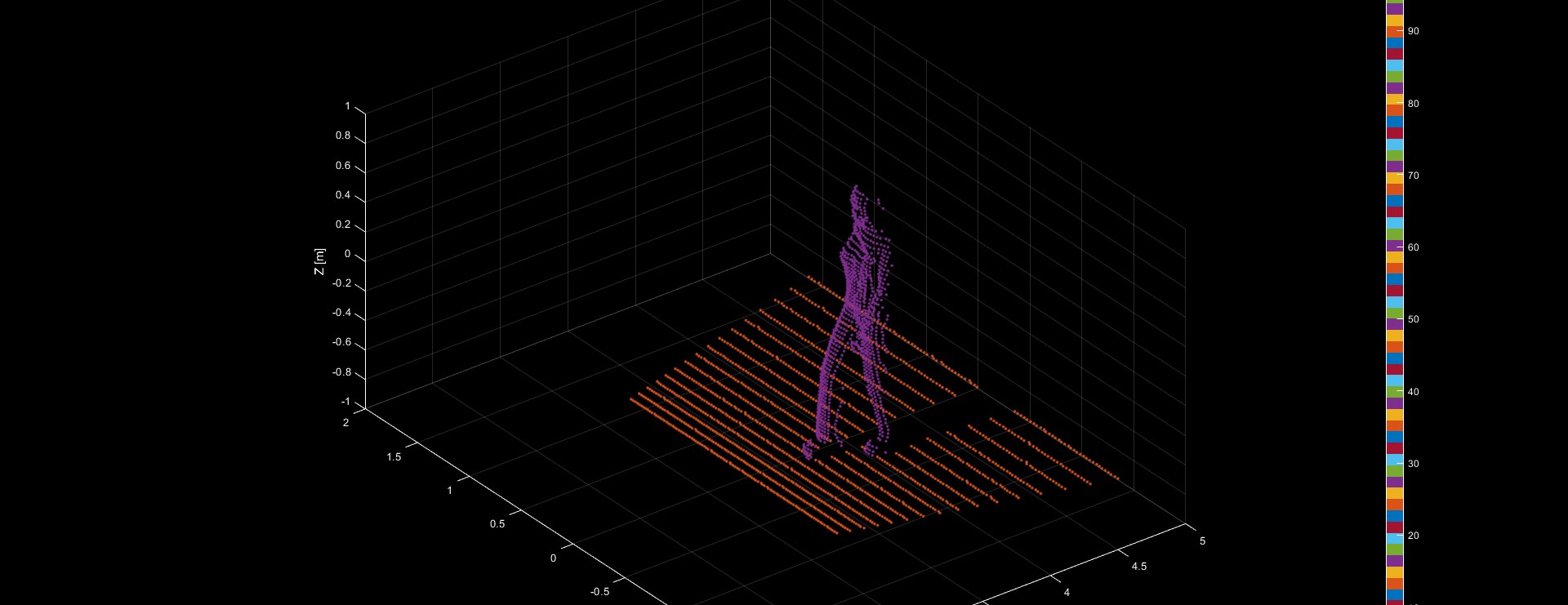
🚨 雷射光達模型(Lidar)
支援機械旋轉式、固態式與 MEMS 光達,可配置 16 / 32 / 64 / 128 等不同線數通道 。PB-Lidar 採逐光束射線追蹤,結合雨霧衰減,依材質反射率回傳幾何點雲 。
輸出形式:帶強度的高密度 3D 點雲、距離影像與物件分割 。
3. 強大的開放式協同與自動化架構
Prescan 具備極佳的軟體開放性,能與汽車產業與開源生態系的各類工具無縫整合 :
-
check_circle
MATLAB / Simulink 深度整合:透過 Compilation Sheet 自動生成致動器 I/O 介面區塊,直接執行閉迴路模擬並支援 Stateflow 狀態機控制 。
-
check_circle
C / C++ API 與自訂模型:可直接整合既有的量產級 ECU 產品代碼,或編譯為獨立的 SimCpp 執行檔以獲得超高效率的模擬速率 。
-
check_circle
Python 自動化流水線:透過 Python 介面實現完全程式化的場景批次修改、自動化執行、數據擷取與 KPI 後處理,並可無縫串接 PyTorch / TensorFlow 深度學習框架與 CI/CD 回歸測試 。
-
check_circle
FMI / FMU 標準協同:支援 Functional Mock-up Interface 業界標準,可黑盒匯入第三方車輛動力學模型(如 CarSim、Amesim FMU)或動力/電池子系統模型,保護供應商智慧財產權(IP) 。
-
check_circle
軟體棧與專業微觀交通流整合:
- AD 軟體棧:可作為開源或自研 AD 框架(如 ROS / ROS 2、Baidu Apollo、Autoware)的虛擬世界與高逼真感測器訊號來源 。
- 交通模擬器:支援透過插件與 PTV Vissim、SUMO、Aimsun 微觀交通模擬器聯動,兼顧宏觀交通真實性與微觀感知細節 。
-
check_circle
Unreal 遊戲引擎渲染:透過 WorldViewer 與 Unreal 引擎深度融合,提供電影級的高品質材質、動態光照與擬真天候效果,極大化提升視覺感知演算法的訓練效能 。
-
check_circle
V2X 通訊協同模擬:內建 V2X 插件,可模擬車對車(V2V)與車對路側基礎設施(V2I)的通訊延遲、丟包與覆蓋範圍,完美驗證路口防碰撞、施工區預警與協同車隊(Platooning)控制 。
導入效益與企業價值總結
導入 Siemens Simcenter Prescan 平台,將為研發團隊帶來六大核心工程效益 :
更快
虛擬迭代結合批次與 Prescan360 雲端並行模擬(彈性調度 Azure 算力),大幅縮短自動駕駛驗證週期 。
更安全
危險工況與高風險長尾極限邊界場景,在虛擬環境中重現測試,達到絕對的「零風險」 。
更省
以高效的虛擬模擬有效補充並精簡實車路測,大幅削減硬體、場地與測試人力成本 。
更全面
三層級感測器模型配合 86 個隨附標準法規場景,提供最全面、覆蓋完整 ODD 的自動化驗證環境 。
可重現
場景完全參數化,測試過程 100% 可重現、可回溯,消除路測偶發性故障難以復現的痛點 。
聯絡我們,加速您的虛擬模擬旅程
捷策動能具備深厚的自動駕駛測試驗證經驗,提供您專業的 Prescan 平台導入、感測器選型佈局優化、場景庫客製化建模、HIL 即時實驗室建置與自動化測試流水線串接等完整 advisory 與技術服務。