dSPACE 汽車電子與自動駕駛全週期測試驗證軟體
在汽車電子與智慧駕駛系統(ADAS/AD)日趨複雜的今天,如何在實車落地前確保軟體演算法的絕對安全?捷策動能為您引進 dSPACE 軟體工具鏈完整解決方案。從模型設計、程式碼產生、虛擬模擬(SIL)到即時硬體在環(HIL)與雲端持續整合(CI/CD),我們協助團隊落實全面「前載測試 (Front-loading)」,在虛擬環境中 24/7 零風險重現任何極端長尾場景。
核心方法論:基於 ASAM XIL API 的全生命週期驗證
dSPACE 工具鏈最核心的工程價值,在於測試資產的高重用性。透過標準的 ASAM XIL API 統一存取介面,同一個測試腳本、環境模型與通訊配置,即可完美貫穿 V 模型的各個核心驗證階段。
| 測試階段 | 平台核心定位與實現方式 |
|---|---|
| Model-in-the-Loop (MIL) | 純模型模擬:在開發最早期、無實體硬體前,於 PC 上以控制策略模型對環境模型進行閉迴路驗證。 |
| Software-in-the-Loop (SIL) | 軟體在環測試:在 PC 上測試已產生的控制軟體或虛擬 ECU(V-ECU),免硬體,支援工作站與雲端大規模平行測試。 |
| Processor-in-the-Loop (PIL) | 處理器在環測試:將產生的程式碼部署至目標處理器評估板,比對並驗證其實際硬體上的資源消耗與時序等價性。 |
| Hardware-in-the-Loop (HIL) | 硬體在環測試:以高可靠即時模擬器仿真整車環境,對實體量產 ECU 控制器進行訊號級與功率級的閉迴路驗證。 |
模組化產品線
1. 核心模擬與整合平台
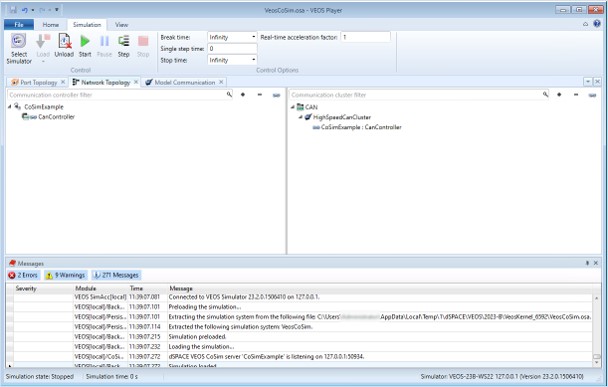
💻 VEOS — PC 端虛擬驗證平台(SIL)
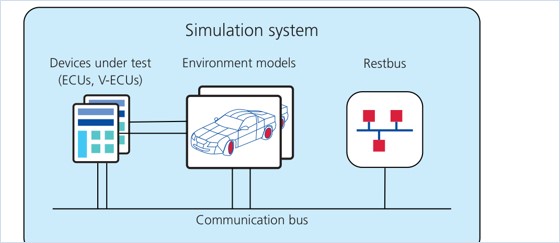
VEOS 是一款純 PC 端的軟體模擬平台。它不需要任何實體 I/O 硬體,便能在標準電腦上同時執行多個虛擬 ECU(V-ECU)、Simulink 模型、FMU 容器以及整車殘餘匯流排(restbus)通訊網絡。
- 特色功能:支援 CAN/LIN/Automotive Ethernet 通訊仿真;可透過 Docker 容器化打包部署至雲端做大規模並行回歸。
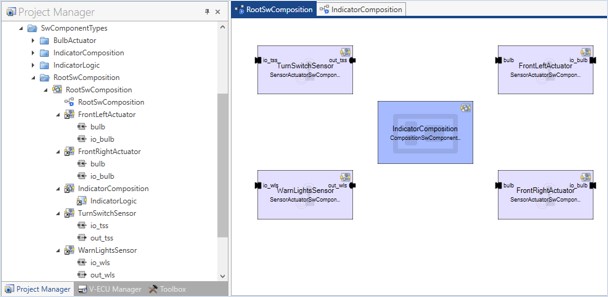
📐 SystemDesk — AUTOSAR 架構建模與 V-ECU 產生器
SystemDesk 用於高直覺建立或匯入(ARXML)合規的 AUTOSAR 系統與軟體架構,並提供 RTE、OS 與通訊堆疊。
- 特色功能:負責將量產應用層與基礎軟體(BSW)代碼,完美封裝成適用於 SIL 執行或跨平台重用的 .vecu 或 .fmu 虛擬 ECU 容器。
🎛️ SCALEXIO — 模組化即時 HIL / RCP 硬體平台
當測試進入硬體環節,SCALEXIO 提供極致的即時運算效能。從桌上型 LabBox 到整棟機櫃系統,皆具備基於 FPGA 的精準快時序 I/O。
- 特色功能:負責搭載 ConfigurationDesk 編譯出的即時應用,與實體 ECU 進行閉迴路硬體測試或快速控制原型(RCP)算法實車代打。

2. 產線級模型與自動代碼產生
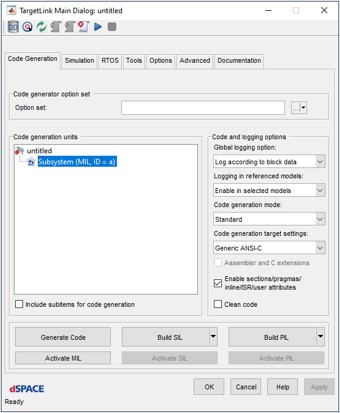
💾 TargetLink — 量產級自動程式碼產生器
直接將 Simulink / Stateflow 模型轉化為高效率、高度優化的定點或浮點 C/C++ 代碼。
- 特色功能:完全支援 AUTOSAR Classic / Adaptive 規範與 MISRA 檢查;內建 MIL/SIL/PIL 切換主對話;通過 ISO 26262 最高安全等級認證。
🚗 ASM 與 ModelDesk — 汽車動力學模型與圖形化場景編輯器
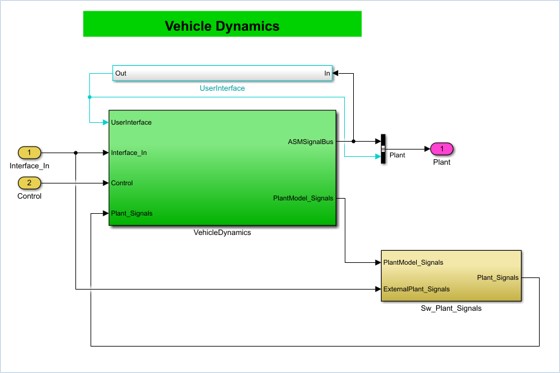
- ASM (Automotive Simulation Models):基於 Simulink 的全開放、可客製多體物理模型,涵蓋車輛底盤動態、輪胎、傳動、燃燒引擎、電池馬達與交通流(ASM Traffic)。
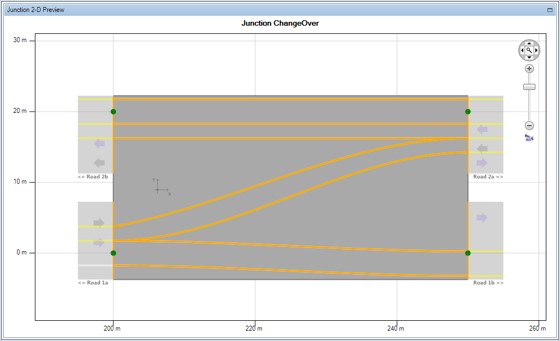
- ModelDesk:ASM 的圖形化參數管理與場景配置前端。支援一鍵手動繪製或自 OpenDRIVE、OpenStreetMap 匯入真實世界地圖。
3. ADAS/AD 感測器真實級仿真環境
👁️ AURELION — 物理式感測器模擬與高擬真視覺化
針對自動駕駛感知網路(相機、雷達、光達、超音波)的端到端(End-to-End)閉迴路需求,AURELION 採用領先的 GPU 射線追蹤(Ray-Tracing)與物理材質光譜計算。
多層級輸出能力:同一個 3D 場景可同步輸出:
- 原始資料(Raw Data):高擬真影像、雷達回波訊號、光達原始點雲,直接餵入感知神經網路。
- 物件清單(Object List):包圍盒、邊界資訊,供決策算法快速整合。
- 完美真值(Ground-Truth):像素級精準的語義分割與深度圖,用於自動測試評分與感知訓練。


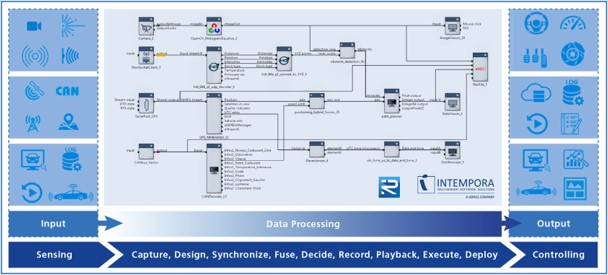
🔀 RTMaps — 多感測器資料擷取與即時融合框架
RTMaps 是一款元件式(Drag-and-drop)的大數據串流框架。內建 600+ 隨插即用模組,專精於高頻率、多種類感測器(相機、Lidar、GNSS/IMU、匯流排)的精準時間戳對齊與時序同步。其低記憶體負擔(Zero-copy)設計是資料記錄與確定性回放(Log & Replay)的業界標竿。
4. 實驗、量測控制與自動化流水線
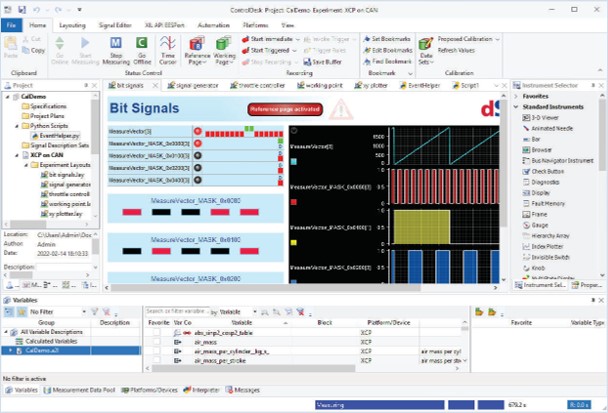
📊 ControlDesk — 通用實驗、量測、校調與視覺化 HMI
ControlDesk 是橫跨所有 dSPACE 即時平台與 VEOS SIL 的統一操作介面。整合了 ECU 量測、標定(CCP/XCP 協議)、診斷(ODX)與豐富的 3D 可視化儀表板於一身,量測結果完全符合 ASAM MDF 業界標準格式。
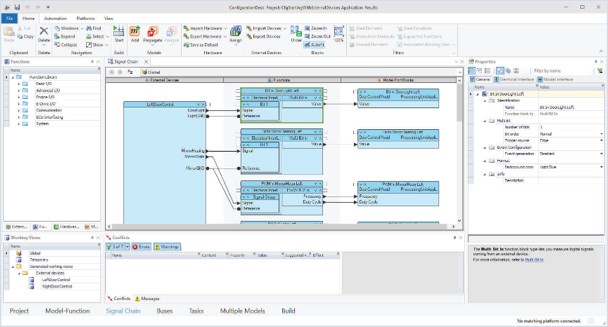
🔌 ConfigurationDesk — 功能式 I/O 建模與即時應用建置
在進行 HIL 實施時,ConfigurationDesk 透過圖形化拖放,將 Simulink 模型或 FMU 容器快速對應至實體硬體板卡的 I/O 訊號鏈與電氣通道。它將行為模型編譯為獨立的即時應用程式下載至硬體,同時支援智慧型故障注入(FIU)與通訊矩陣(DBC/ARXML)匯入。
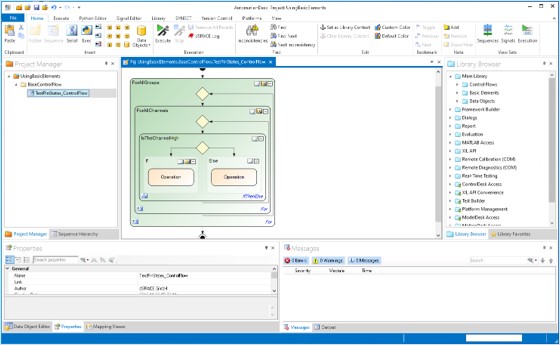
🤖 AutomationDesk & RTT / SDK — 測試自動化編排與 Python 即時測試
- AutomationDesk:無須寫程式即可建立、管理複雜測試序列的圖形化 IDE,並能自動產生 PDF/HTML 測試報告。
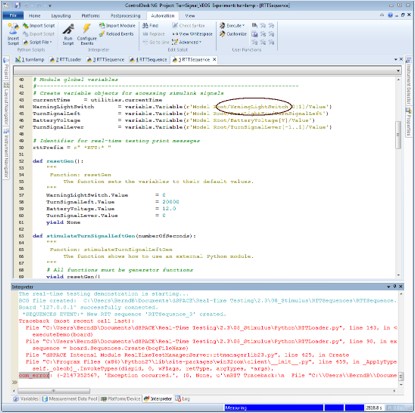
- Real-Time Testing (RTT) / SDK:基於 Python(Pytest、Robot Framework)的極致測試方案。RTT 的 Python 直譯器直接在核心硬體中與模型在每個取樣步同步執行(毫秒級精度、無通訊延遲),同一份測試代碼完美重用於 SIL(VEOS)與 HIL(SCALEXIO)。
端到端場景化組合實作矩陣
dSPACE 的核心技術優勢在於將模型與程式碼封裝為解耦的標準容器:如 V-ECU(.vecu)、模型容器(.sic)、殘餘匯流排容器(.bsc)與標準 FMU。這使得研發團隊能在不同的工程情境中自由搭配、靈活實現工作流程。
1. 虛擬 ECU 軟體在環(SIL V-ECU) [ 適用於軟體早期前載與 CI/CD ]
- 產品搭配:SystemDesk + TargetLink + VEOS + ControlDesk + Platform API Package
- 資料流實現:由 TargetLink 產生 C 碼並由 SystemDesk 封裝出 V-ECU(.vecu),隨後匯入 VEOS Player 中與其餘容器組裝成離線應用(.osa)。在 Docker 雲端環境中配合 Python 腳本(Platform API)執行大規模平行回歸。
2. HIL 電氣故障注入(Fault Injection HIL) [ 適用於 ISO 26262 安全機制驗證 ]
- 產品搭配:SCALEXIO (含 FIU 硬體) + ConfigurationDesk + AutomationDesk (EESPort) + ASM
- 資料流實現:在 ConfigurationDesk 設定故障注入單元(FIU)與 I/O 路由。自動化測試程序透過 XIL API 的 EESPort(電氣錯誤模擬埠) 送出故障序列,即時斷開硬體電路、製造對地/對電源短路,逼真考驗受測 ECU 的診斷碼(DTC)與安全降級反應。
3. ADAS / AD 感測器在環閉迴路(Sensor-in-the-Loop HIL/SIL) [ 適用於自駕與 SOTIF 情境覆蓋 ]
- 產品搭配:ModelDesk + ASM Traffic + AURELION + Sensor Sim PC (高階 GPU) + SCALEXIO 或 VEOS
- 資料流實現:由 ModelDesk 提供 OpenDRIVE/OpenSCENARIO 場景矩陣。ASM Traffic 提供僚車動力學與本車軌跡。AURELION 在 GPU PC 上即時計算射線追蹤,將擬真感測器數據(如雷達 RD 圖、光達點雲)注入自駕控制器;受測系統之油門/轉向指令再即時反饋回 ASM 模型,形成完美的 ADAS 物理級閉迴路。
企業核心導入效益總結
-
📉
缺陷成本最小化 軟體架構與殘餘匯流排模擬全面虛擬化(SIL),使 80% 的軟體錯誤在專案極早期、無硬體台架時便被揪出修正。
-
📈
測試覆蓋率最大化 依循 ASAM XIL 標準,同套腳本通吃 SIL 與 HIL。搭配 24/7 自動化測試與 Docker 雲端並行,大幅提高極端邊界與功能安全案例的覆蓋度。
-
🤝
跨工具鏈生態開放 全面兼容 FMI/FMU 模型交換標準、AUTOSAR Classic/Adaptive 架構以及 MATLAB/Simulink 的深度內生串接。